@article{sukhija2025somrbl,title={SOMBRL: Scalable and Optimistic Model-Based RL},author={Sukhija, Bhavya and Treven, Lenart and Sferrazza, Carmelo and Dörfler, Florian and Abbeel, Pieter and Krause, Andreas},journal={NeurIPS},year={2025},}
MaxInfoRL: Boosting exploration in reinforcement learning through information gain maximization
Bhavya Sukhija, Stelian Coros, Andreas Krause, and
2 more authors
@article{sukhija2024maxinforl,title={MaxInfoRL: Boosting exploration in reinforcement learning through information gain maximization},author={Sukhija, Bhavya and Coros, Stelian and Krause, Andreas and Abbeel, Pieter and Sferrazza, Carmelo},journal={ICLR},year={2025}}
2024
ActSafe: Active Exploration with Safety Constraints for Reinforcement Learning
Yarden As*, Bhavya Sukhija*, Lenart Treven, and
3 more authors
@article{as2024actsafe,title={ActSafe: Active Exploration with Safety Constraints for Reinforcement Learning},author={As*, Yarden and Sukhija*, Bhavya and Treven, Lenart and Sferrazza, Carmelo and Coros, Stelian and Krause, Andreas},journal={arXiv preprint arXiv:2410.09486},year={2024}}
NeoRL: Efficient Exploration for Nonepisodic RL
Bhavya Sukhija, Lenart Treven, Florian Dörfler, and
2 more authors
Proc. Neural Information Processing Systems (NeurIPS), 2024
@article{sukhija2024neorl,title={NeoRL: Efficient Exploration for Nonepisodic RL},author={Sukhija, Bhavya and Treven, Lenart and Dörfler, Florian and Coros, Stelian and Krause, Andreas},journal={Proc. Neural Information Processing Systems (NeurIPS)},year={2024},note={<b>Spotlight</b>},}
When to Sense and Control? A Time-adaptive Approach for Continuous-Time RL
Lenart Treven, Bhavya Sukhija, Yarden As, and
2 more authors
Proc. Neural Information Processing Systems (NeurIPS), 2024
@article{treven2024sense,title={When to Sense and Control? A Time-adaptive Approach for Continuous-Time RL},author={Treven, Lenart and Sukhija, Bhavya and As, Yarden and Dörfler, Florian and Krause, Andreas},journal={Proc. Neural Information Processing Systems (NeurIPS)},year={2024},}
Bridging the Sim-to-Real Gap with Bayesian Inference
Jonas Rothfuss*, Bhavya Sukhija*, Lenart Treven*, and
3 more authors
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
@article{rothfuss2024bridging,title={Bridging the Sim-to-Real Gap with Bayesian Inference},author={Rothfuss*, Jonas and Sukhija*, Bhavya and Treven*, Lenart and Dörfler, Florian and Coros, Stelian and Krause, Andreas},journal={IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},year={2024},note={<b>Oral presentation</b>},}
Transductive Active Learning: Theory and Applications
Jonas Hübotter, Bhavya Sukhija, Lenart Treven, and
2 more authors
Proc. Neural Information Processing Systems (NeurIPS), 2024
@article{hubotter2024transductive,title={Transductive Active Learning: Theory and Applications},author={H{\"u}botter, Jonas and Sukhija, Bhavya and Treven, Lenart and As, Yarden and Krause, Andreas},journal={Proc. Neural Information Processing Systems (NeurIPS)},year={2024},note={<b>Oral presentation</b> at the ARLET ICML workshop},}
Data-Efficient Task Generalization via Probabilistic Model-based Meta Reinforcement Learning
Arjun Bhardwaj, Jonas Rothfuss, Bhavya Sukhija, and
4 more authors
IEEE Robotics and Automation Letters, 2024
2023
Optimistic Active Exploration of Dynamical Systems
Bhavya Sukhija, Lenart Treven, Cansu Sancaktar, and
3 more authors
In Proc. Neural Information Processing Systems (NeurIPS), 2023
@inproceedings{opax,title={Optimistic Active Exploration of Dynamical Systems},author={Sukhija, Bhavya and Treven, Lenart and Sancaktar, Cansu and Blaes, Sebastian and Coros, Stelian and Krause, Andreas},booktitle={Proc. Neural Information Processing Systems (NeurIPS)},year={2023},eprint={2306.12371},}
GoSafeOpt: Scalable safe exploration for global optimization of dynamical systems
Bhavya Sukhija, Matteo Turchetta, David Lindner, and
3 more authors
@article{SUKHIJA2023103922,title={GoSafeOpt: Scalable safe exploration for global optimization of dynamical systems},journal={Artificial Intelligence Journal (AIJ)},volume={320},pages={103922},year={2023},author={Sukhija, Bhavya and Turchetta, Matteo and Lindner, David and Krause, Andreas and Trimpe, Sebastian and Baumann, Dominik},url={https://www.sciencedirect.com/science/article/pii/S0004370223000681},}
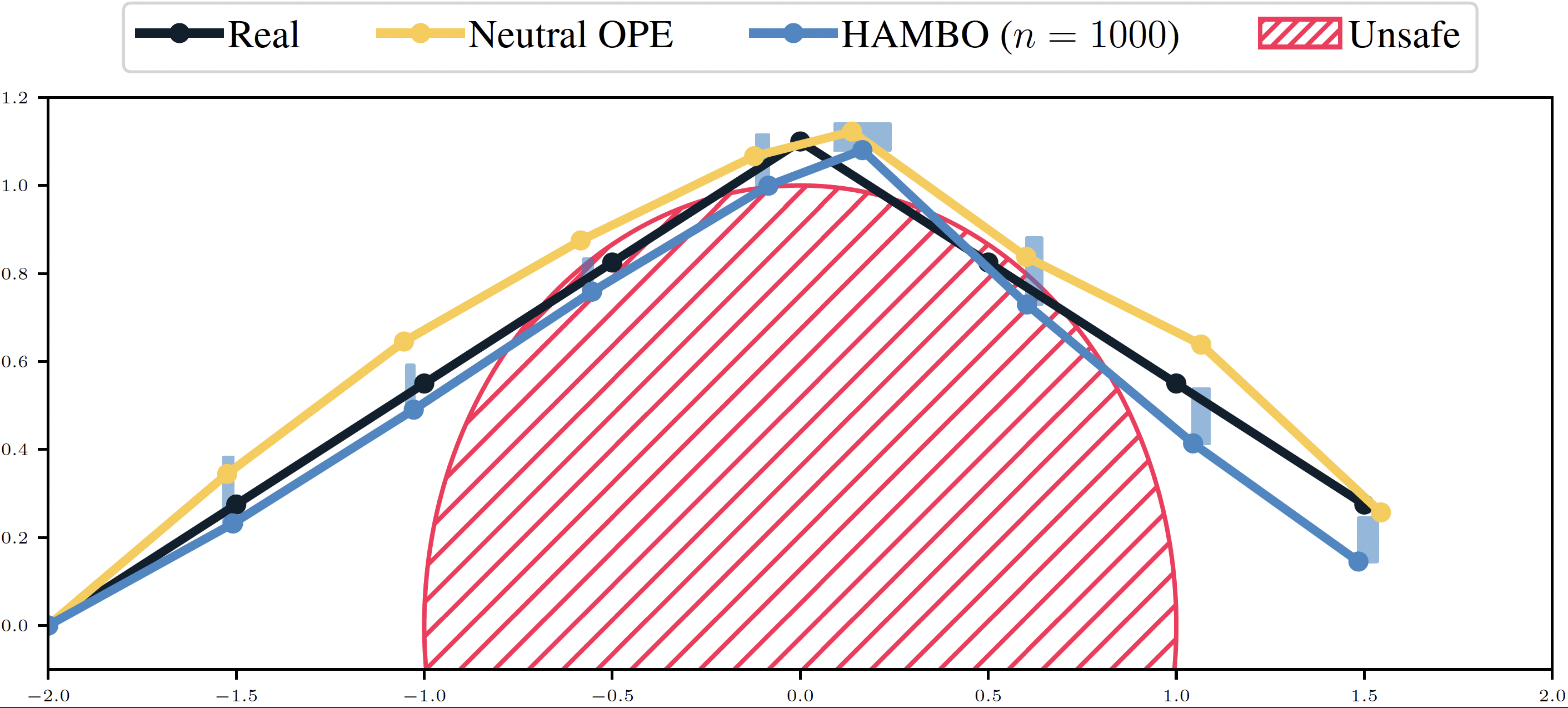
Hallucinated Adversarial Control for Conservative Offline Policy Evaluation
Jonas Rothfuss*, Bhavya Sukhija*, Tobias Birchler*, and
2 more authors
In Conference on Uncertainty in Artificial Intelligence (UAI), 2023
@inproceedings{rothfuss2023hallucinated,title={Hallucinated Adversarial Control for Conservative Offline Policy Evaluation},author={Rothfuss*, Jonas and Sukhija*, Bhavya and Birchler*, Tobias and Kassraie, Parnian and Krause, Andreas},year={2023},booktitle={Conference on Uncertainty in Artificial Intelligence (UAI)},}
Tuning Legged Locomotion Controllers via Safe Bayesian Optimization
Daniel Widmer*, Dongho Kang*, Bhavya Sukhija, and
3 more authors
@inproceedings{widmer2023tuning,title={Tuning Legged Locomotion Controllers via Safe Bayesian Optimization},author={Widmer*, Daniel and Kang*, Dongho and Sukhija, Bhavya and H\"ubotter, Jonas and Krause, Andreas and Coros, Stelian},booktitle={Conference on Robot Learning (CoRL)},year={2023},}
Efficient Exploration in Continuous-time Model-based Reinforcement Learning
Lenart Treven, Jonas Hübotter, Bhavya Sukhija, and
2 more authors
In Proc. Neural Information Processing Systems (NeurIPS), Dec 2023
@article{sukhija2022gradientbased,title={Gradient-Based Trajectory Optimization With Learned Dynamics},author={Sukhija, Bhavya and K\"ohler, Nathanael and Zamora, Miguel and Zimmermann, Simon and Curi, Sebastian and Krause, Andreas and Coros, Stelian},journal={IEEE International Conference on Robotics and Automation (ICRA)},year={2023},}